인류는 오랜 세월 동안 미지의 우주를 탐험하고 싶다는 열망을 품어왔습니다. 그러나 광활한 우주 공간의 가혹한 환경은 인간의 직접적인 탐사를 제약합니다. 이러한 한계를 극복하고 우주의 비밀을 밝히기 위해 등장한 것이 바로 우주 탐사 로봇입니다. 인간의 손길이 닿을 수 없는 극한의 공간에서, 이 로봇들은 지칠 줄 모르는 탐험가이자 정밀한 과학자로서 맹활약하며 인류에게 놀라운 발견과 통찰을 선사하고 있습니다. 작은 탐사차부터 거대한 궤도선까지, 이 무인 탐사대들은 우주선을 타고 멀리 떨어진 행성과 위성, 소행성에 도달하여 귀중한 데이터를 수집하고 지구로 전송합니다. 이번 글에서는 우주 탐사 로봇의 역사와 기술적 발전, 그리고 그들이 이뤄낸 위대한 성과들을 통해 우주 탐사의 미래를 조망해보고자 합니다.
1. 우주 탐사 로봇, 그들은 왜 필요한가? - 인간의 한계를 넘어
우주 탐사 로봇이 필요한 가장 근본적인 이유는 바로 인간이 직접 탐사하기 어려운 극한의 환경 때문입니다. 우주 공간은 진공 상태이며, 극심한 온도 변화(영하 200℃에서 영상 200℃ 이상까지), 치명적인 방사선, 그리고 미세 운석 충돌의 위험이 상존합니다. 이러한 환경은 인간 생명체에게 치명적이며, 생명 유지 장치를 갖춘 유인 우주선이라 할지라도 막대한 비용과 기술적 어려움을 수반합니다. 게다가, 지구에서 수억 킬로미터 떨어진 행성까지 도달하는 데는 수개월에서 수년이 걸리며, 이 긴 여정 동안 인간 탐사대가 버티기란 매우 어렵습니다.
반면, 우주 탐사 로봇은 이러한 제약에서 비교적 자유롭습니다. 로봇은 생명 유지 장치가 필요 없으므로 설계가 단순해지고, 무게를 줄일 수 있어 발사 비용을 절감할 수 있습니다. 또한, 혹독한 환경에 견딜 수 있도록 특수 재료와 기술로 제작되어 극한의 온도나 방사선에도 버틸 수 있습니다. 로봇은 인간보다 훨씬 정밀하고 반복적인 작업을 수행할 수 있으며, 지루하거나 위험한 임무를 지치지 않고 수행할 수 있습니다. 예를 들어, 화성의 척박한 표면에서 수년간 이동하며 토양 샘플을 채취하거나, 거대 가스 행성의 혹독한 대기권을 분석하는 임무는 로봇이 아니면 불가능합니다.
또한, 우주 탐사 로봇은 과학적 발견의 효율성을 극대화합니다. 로봇은 다양한 과학 장비(카메라, 스펙트로미터, 드릴, 로봇 팔 등)를 탑재하고 데이터를 실시간으로 지구로 전송할 수 있습니다. 이를 통해 과학자들은 원격으로 탐사 임무를 지휘하고, 미지의 행성에서 직접 탐사하는 것과 같은 생생한 정보를 얻을 수 있습니다. 인간의 안전을 보장하면서도 우주 탐사의 지평을 넓히는 데 있어 우주 탐사 로봇은 필수불가결한 존재이며, 앞으로도 그 역할은 더욱 중요해질 것입니다.
2. 화성 탐사 로버: 붉은 행성의 비밀을 파헤치다
화성은 인류의 우주 탐사 역사에서 가장 뜨거운 관심을 받아온 행성 중 하나입니다. 과거 물의 흔적과 잠재적인 생명체의 존재 가능성 때문에, 화성 탐사 로봇들은 붉은 행성의 비밀을 파헤치는 데 선봉장 역할을 해왔습니다. 이들 중 가장 대표적인 존재는 단연 화성 탐사 로버(Mars Rover) 시리즈입니다. 나사(NASA)의 소저너(Sojourner)는 1997년 화성 표면에 성공적으로 착륙하여 화성 탐사의 새로운 시대를 열었습니다. 작고 가벼웠던 소저너는 제한적인 활동 범위에도 불구하고, 화성 표면의 암석과 토양을 분석하여 화성 표면의 화학적 조성을 밝히는 데 기여했습니다.
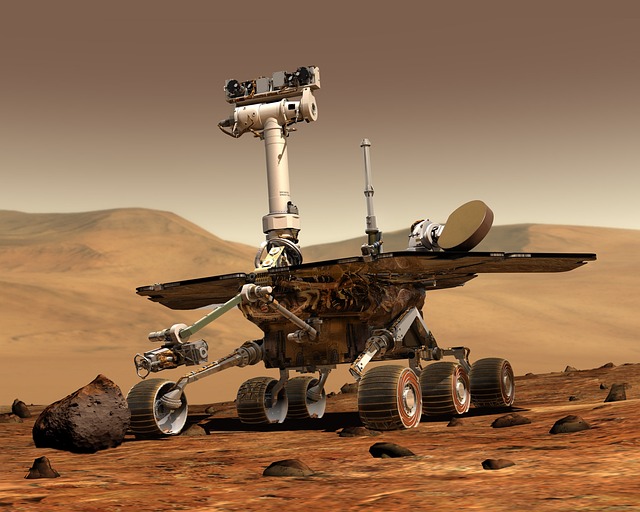
이후 2004년에 쌍둥이 로버인 스피릿(Spirit)과 오퍼튜니티(Opportunity)가 화성에 착륙하여 화성 탐사의 황금기를 열었습니다. 당초 90일 임무를 위해 설계되었지만, 오퍼튜니티는 무려 15년 이상을 활동하며 수많은 과학적 발견을 이뤄냈습니다. 이들 로버는 화성에 과거 물이 흘렀던 흔적, 즉 퇴적암과 염분 광물을 발견하여 화성이 한때 액체 상태의 물을 가지고 있었다는 결정적인 증거를 제시했습니다. 이는 화성에서 생명체가 존재했을 가능성을 크게 높였습니다.
2012년에 화성에 착륙한 큐리오시티(Curiosity) 로버는 더욱 진보된 과학 장비를 탑재하고 화성의 게일 분화구(Gale Crater)를 탐사하며, 이 지역이 과거에 생명체가 살 수 있는 환경이었음을 밝혀냈습니다. 큐리오시티는 화성의 대기, 토양, 암석 샘플을 분석하여 유기 분자와 질소 화합물을 발견하는 등 중요한 성과를 거두었습니다. 그리고 2021년에는 가장 최신예 로버인 퍼서비어런스(Perseverance)가 화성 제제로 분화구(Jezero Crater)에 착륙하여, 고대 강 삼각주 지역에서 과거 생명체의 흔적을 찾고 화성 샘플을 채취하여 지구로 가져올 준비를 하고 있습니다. 퍼서비어런스와 함께 비행한 잉제뉴어티(Ingenuity) 헬리콥터는 외계 행성에서 최초로 동력 비행에 성공하며 미래 화성 탐사의 새로운 가능성을 제시했습니다. 이처럼 화성 탐사 로버들은 끊임없이 붉은 행성의 비밀을 파헤치며 인류의 우주에 대한 이해를 확장하고 있습니다.
3. 외행성 탐사선: 거대 가스 행성의 베일을 벗기다
태양계의 바깥쪽에 위치한 거대 가스 행성들(목성, 토성, 천왕성, 해왕성)은 지구로부터 너무 멀리 떨어져 있고 혹독한 환경을 가지고 있어 인간이 직접 방문하기 어렵습니다. 그러나 외행성 탐사선(Outer Planet Probes)들은 이 거대한 행성들의 신비로운 베일을 벗기는 데 결정적인 역할을 해왔습니다. 가장 대표적인 탐사선은 보이저 1호와 2호(Voyager 1 & 2)입니다. 1977년에 발사된 이 쌍둥이 탐사선은 목성, 토성, 천왕성, 해왕성 등 모든 외행성을 근접 비행하며 상세한 사진과 데이터를 전송했습니다. 보이저 1호는 현재 태양계를 벗어나 성간 공간(interstellar space)을 비행하며 인류가 만든 물체 중 가장 멀리 나아간 기록을 세우고 있습니다. 보이저 탐사선이 보내온 데이터는 거대 가스 행성들의 대기 조성, 자기장, 위성들의 지질 활동 등에 대한 놀라운 발견을 가능하게 했습니다.
토성 탐사선인 카시니-하위헌스(Cassini-Huygens) 임무는 특히 주목할 만합니다. 1997년에 발사된 카시니 탐사선은 2004년부터 2017년까지 13년 동안 토성 궤도를 돌면서 토성의 복잡한 고리 시스템, 수많은 위성들, 그리고 토성 대기의 특징을 상세하게 연구했습니다. 카시니 탐사선은 특히 토성의 위성인 엔셀라두스(Enceladus)에서 지하 바다의 존재와 간헐천 활동을 확인하여 생명체 존재 가능성을 제시했으며, 또 다른 위성인 타이탄(Titan)의 두꺼운 대기를 뚫고 액체 메탄 호수를 발견하는 등 경이로운 발견들을 이뤄냈습니다. 하위헌스 탐사선은 타이탄 표면에 직접 착륙하여 외부 태양계 위성 표면에 착륙한 최초의 탐사선이라는 기록을 남겼습니다.
최근에는 목성 탐사선인 주노(Juno)가 2016년부터 목성 궤도를 돌면서 목성의 대기, 자기장, 내부 구조에 대한 데이터를 수집하고 있습니다. 주노는 목성의 구름 아래에 대한 자세한 정보를 제공하며, 목성 대기의 폭풍과 오로라 현상 등을 연구하는 데 기여하고 있습니다. 이처럼 외행성 탐사 로봇들은 인류가 상상조차 할 수 없었던 태양계 외곽의 신비로운 세계를 밝혀내며 우주에 대한 우리의 이해를 한 차원 높였습니다.
4. 소행성과 혜성 탐사: 태양계의 흔적을 찾아서
소행성과 혜성은 태양계 형성 초기의 물질을 고스란히 간직하고 있는 '시간의 캡슐'과 같습니다. 이들을 탐사하는 것은 태양계의 기원과 진화, 그리고 지구의 물과 생명체 기원에 대한 중요한 단서를 얻는 데 필수적입니다. 우주 탐사 로봇들은 이러한 소행성과 혜성을 직접 방문하여 그들의 비밀을 파헤치는 데 성공했습니다. 일본 우주항공연구개발기구(JAXA)의 하야부사(Hayabusa) 탐사선 시리즈는 소행성 탐사의 선구자적인 역할을 했습니다. 하야부사 1호는 2005년 이토카와(Itokawa) 소행성에 착륙하여 표본을 채취하고 2010년 성공적으로 지구로 귀환했습니다. 이어서 발사된 하야부사 2호는 2018년 류구(Ryugu) 소행성에 착륙하여 표본을 채취하고 2020년 성공적으로 지구로 귀환했습니다. 류구 소행성 샘플 분석 결과, 과학자들은 소행성 내부에 물과 유기물이 존재한다는 것을 확인했으며, 이는 생명의 기원과 진화에 대한 중요한 실마리를 제공하고 있습니다.
나사(NASA)의 오시리스-렉스(OSIRIS-REx) 탐사선 또한 2020년 베누(Bennu) 소행성에서 표본을 채취하여 2023년 성공적으로 지구로 귀환했습니다. 이 샘플들은 지구 충돌 가능성이 있는 소행성의 물리적, 화학적 특성을 파악하고 미래 행성 방어 전략을 수립하는 데 귀중한 정보를 제공할 것입니다. 혜성 탐사 분야에서도 로봇들의 활약은 눈부셨습니다. 유럽우주국(ESA)의 로제타(Rosetta) 탐사선은 2014년에 67P/추류모프-게라시멘코 혜성에 도착하여 궤도를 돌았으며, 탐사선에 탑재된 필레(Philae) 착륙선은 혜성 표면에 착륙하는 데 성공했습니다. 이는 인류 역사상 최초로 혜성 표면에 착륙한 사례로, 혜성 표면의 환경과 구성 물질에 대한 놀라운 데이터를 제공했습니다. 로제타 임무는 혜성에서 유기 분자와 물의 존재를 확인하여, 혜성이 지구에 물과 생명체의 씨앗을 가져다주었을 가능성을 높였습니다. 이처럼 소행성과 혜성 탐사 로봇들은 태양계의 초기 모습을 간직한 천체들을 직접 조사함으로써 우주의 오랜 역사를 밝히는 데 결정적인 기여를 하고 있습니다.
5. 미래의 우주 탐사 로봇: 인공지능과 자율성의 발전
현재의 우주 탐사 로봇들은 이미 놀라운 성과를 거두었지만, 미래의 로봇들은 더욱 진보된 기술과 인공지능(AI)을 기반으로 더욱 자율적이고 복잡한 임무를 수행할 것으로 기대됩니다. 현재의 로봇들은 지구의 관제센터로부터 원격 명령을 받아 작동하지만, 태양계 외곽의 심우주 탐사에서는 통신 지연 시간이 너무 길어 실시간 제어가 어렵습니다. 이러한 문제를 해결하기 위해 인공지능 기반의 자율 탐사 로봇 개발이 활발히 이루어지고 있습니다. 미래의 로봇들은 자체적으로 데이터를 분석하고, 최적의 탐사 경로를 결정하며, 예상치 못한 상황에 자율적으로 대응할 수 있는 능력을 갖추게 될 것입니다. 예를 들어, 미지의 행성 표면에서 위험 요소를 감지하거나, 특정 과학적 가치를 지닌 지형을 스스로 인식하여 탐사 우선순위를 조절하는 등 더욱 똑똑하게 임무를 수행할 수 있게 됩니다.
또한, 다양한 형태의 특수 목적 로봇이 개발될 예정입니다. 목성의 얼음 위성인 유로파(Europa)나 토성의 위성 엔셀라두스처럼 지하 바다가 존재할 것으로 예상되는 곳에는 수중 탐사 로봇(Hydrobots)이 투입되어 얼음 아래 바다 속을 탐험하고 생명체 흔적을 찾을 것입니다. 타이탄과 같은 위성에는 드론이나 비행선을 이용한 항공 탐사 로봇(Aerobots)이 투입되어 두꺼운 대기권을 탐사할 수도 있습니다. 소행성이나 혜성의 표면에서는 다리 달린 로봇이나 점프 로봇이 불규칙한 지형을 효과적으로 이동하며 자원 채굴이나 샘플 채취 임무를 수행할 수도 있습니다.
미래의 우주 탐사 로봇은 로봇 간의 협력(Robotic Swarm)을 통해 더욱 효율적인 탐사가 가능해질 것입니다. 여러 대의 로봇이 동시에 한 지역을 탐사하거나, 서로 다른 기능을 가진 로봇들이 협력하여 복잡한 임무를 수행하는 방식입니다. 이러한 발전은 인류가 도달할 수 없었던 심우주의 미개척지를 탐험하고, 궁극적으로는 외계 생명체를 발견하는 데 결정적인 역할을 할 것입니다. 우주 탐사 로봇은 단순한 기계가 아니라, 인류의 호기심과 지적 능력을 확장하는 미래의 탐험가이자 개척자가 될 것입니다.
6. 우주 탐사 로봇의 도전 과제: 기술적 한계와 윤리적 고찰
우주 탐사 로봇은 놀라운 성공을 거두었지만, 여전히 수많은 도전 과제에 직면해 있습니다. 가장 큰 기술적 과제는 극심한 우주 환경에 대한 내구성입니다. 우주 방사선은 로봇의 전자 장비에 치명적인 손상을 입힐 수 있으며, 극한의 온도 변화는 부품의 수명을 단축시킵니다. 따라서 우주 탐사 로봇은 이러한 환경을 견딜 수 있는 특수 설계와 재료 공학 기술을 필요로 합니다. 또한, 지구로부터 수억 킬로미터 떨어진 곳에서의 원격 제어 및 통신 지연 문제는 여전히 큰 걸림돌입니다. 빛의 속도로 이동하는 전파도 수십 분에서 수 시간이 걸리기 때문에, 실시간으로 로봇을 제어하기 어렵습니다. 이는 로봇의 자율성 강화 필요성을 더욱 부각시키는 이유가 됩니다.
에너지원 문제도 중요한 과제입니다. 현재 대부분의 탐사 로봇은 태양 전지판이나 방사성 동위원소 열전 발전기(RTG)를 사용하지만, 태양으로부터 멀리 떨어진 외행성 탐사나 장기간 임무 수행에는 한계가 있습니다. 더 효율적이고 지속 가능한 에너지원 개발이 필수적입니다. 또한, 예상치 못한 고장이나 문제 발생 시의 대처도 중요합니다. 수리 인력을 보낼 수 없으므로, 로봇 자체적으로 문제 해결 능력을 갖추거나 지구에서 원격으로 진단하고 해결할 수 있는 시스템이 필요합니다.